

Рис. Texa
CAN - это аббревиатура английского термина Control Area Area Network, который определяет тип промышленной сети связи, используемой в автомобильной промышленности с восьмидесятых годов, в 1993 году стандартизированный стандартом ISO 11898.
Коммуникационная сеть CAN характеризуется:
- высокая безопасность передачи информации и отказоустойчивость;
- скорость передачи до 1 Мбит / с;
- многоузловая архитектура, где каждый сетевой узел имеет одинаковые права и возможности;
- широковещательная передача информации, т.е. без необходимости указывать получателя.
Типы сети CAN
В соответствии с классификацией SAE (Общество инженеров автомобильной промышленности) стандарты трансмиссии CAN могут быть отнесены к одной из трех основных категорий в зависимости от скорости и выполняемых функций:
- Класс A - базовая сеть с низкой скоростью передачи (от 32,5 до 62,5 кбит / с), небольшим объемом информации и средним временем отклика 100 мс;
- Класс B / C - межсистемное мультиплексирование со средней скоростью передачи (от 125 до 500 кбит / с), средним объемом информации и средним временем отклика 10 мс;
- класс D - быстрое мультиплексирование с высокой скоростью передачи (от 500 до 1 Мбит / с), огромным объемом информации и средним временем отклика 5 мс.
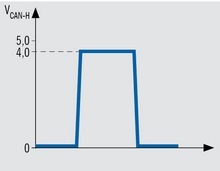
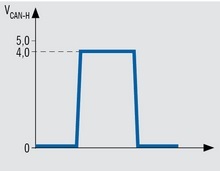
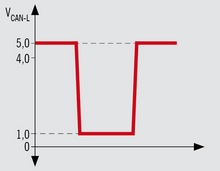
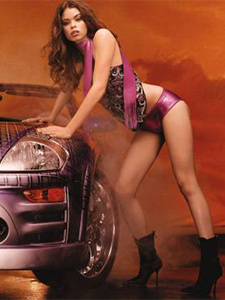
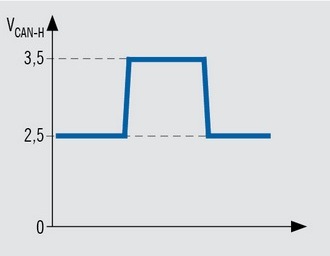
Рис. 1. Правильный сигнал, отображаемый модулем T-NET в Texa UNIProbe для линии A-CAN H
Рис. 2. Правильный сигнал отображается с помощью модуля T-Net на Texa UniProbe для линии B-CAN H
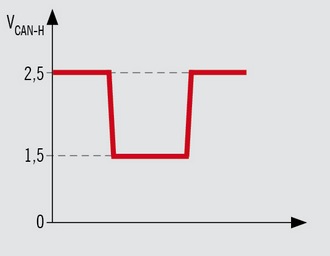
Рис. 3. Правильный сигнал, отображаемый модулем T-Net на Texa UniProbe для линии B-CAN L
Шина данных класса A CAN (в дальнейшем именуемая A-CAN) обладает свойством переносить электрические проблемы (отказоустойчивые), которые чаще всего используются в зоне комфорта тела. В отличие от шин C-CAN и B-CAN, информация передается по ней с помощью одного кабеля (однопроводного), то есть так называемого «витая пара» (пара кабелей). Отказоустойчивое свойство не означает, что шина может продолжать работать в случае короткого замыкания на землю или перенапряжения батареи, но каждый узел может возобновить свою работу без ошибок. Важным преимуществом этой системы также является низкая стоимость узла. Кроме того, шина A-CAN (однопроводная) характеризуется низкой чувствительностью к помехам.
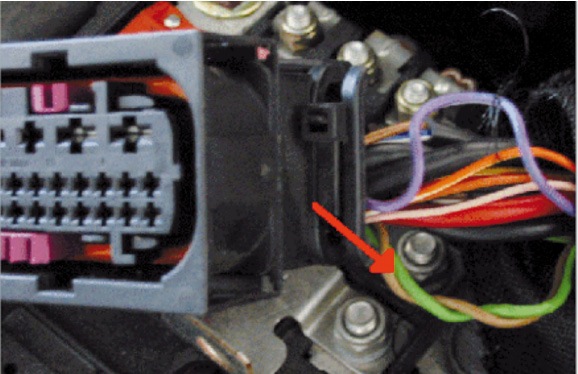
Рис. 4. Пример витой пары CAN
Шина данных класса B CAN (в дальнейшем именуемая B-CAN) имеет среднюю скорость передачи около 90 кбит / с и не требует двойного витого провода. Этот тип в основном используется в секции кузова и комфорта. B-CAN также является отказоустойчивой сетью, то есть допускает электрические неисправности. Это означает, что рельс может функционировать даже при следующих неисправностях:
- разрушение кабеля CAN-H;
- разрушение кабеля CAN-L;
- короткое замыкание кабеля CAN-H на массу;
- короткое замыкание кабеля CAN-L на массу;
- короткое замыкание кабеля CAN-H на напряжение питания;
- короткое замыкание кабеля CAN-L на напряжение питания;
- короткое замыкание между двумя проводниками CAN-H и CAN-L.
Ф о 5. Правильный сигнал отображается с помощью модуля T-Net на Texa UniProbe для линии C-CAN H
Рис. 6. Правильный сигнал, отображаемый модулем T-Net на Texa UniProbe для линии C-CAN L
В этих условиях шина все еще работает, даже если вероятность ошибки вдоль шины увеличивается, поскольку информация имеет более высокую частоту ошибок во время передачи, поэтому неизбежно уменьшать количество битов, передаваемых в секунду. Это основная причина, по которой отказоустойчивые системы не используются в сетях, подключенных к компонентам безопасности, где необходимо получать информацию в режиме реального времени.
Электрические проверки должны включать уровни напряжения, показанные на фотографиях. Если значения, считанные с помощью модуля T-Net, не совпадают, необходимо проверить сопротивление линии и их изоляцию. Данные сопротивления могут быть прочитаны через T-Net в динамическом режиме (во время работы сети). Поскольку окончательное значение этой системы распределено по всей сети, а значение дифференциального сопротивления зависит от узлов, из которых состоит сеть, необязательно, чтобы каждый узел имел одинаковое сопротивление, но общее сопротивление составляет порядка нескольких сотен Ом.

Ф о 7. Вкладка для диагностики CAN-связи - программа Texa IDC4e, устройство Texa UNIProbe.
Сеть передачи данных класса CAN имеет высокую скорость передачи (от 125 кбит / с до 1 Мбит / с). Требуется использование двойного витого кабеля (так называемая «витая пара»). Этот тип автобусов используется в основном для основных систем безопасности, в которых требуется ответ в реальном времени. C-CAN не является отказоустойчивой сетью (она не терпит электрических повреждений). Это означает, что шина перестанет работать в случае обрыва проводов или короткого замыкания.
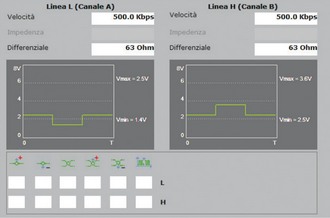
Рис. 8. Считывание правильного потока сигналов в сети C-CAN
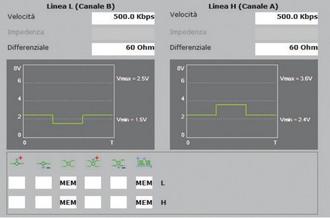
Рис. 9. Сетевой сигнал C-CAN с информацией о предыдущем возникновении короткого замыкания линии H-L, которое привело к потере сигнала
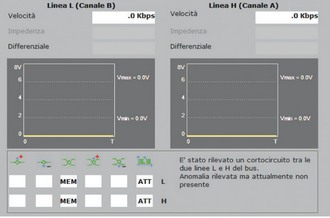
Рис. 10. Измерение, выполненное при попытке форсировать ошибку
В сети типа C-CAN используются две линии, называемые L и H. Обе они закрыты концевыми резисторами, номинальное значение которых составляет 120 Ом каждая. Каждый узел способен генерировать дифференциальное напряжение между 1,5 В и 3 В, измеренное при активной нагрузке 60 Ом (сопротивление, «видимое» каждым узлом).
Два согласующих резистора предназначены для «адаптации» линии передачи в общем виде (конечно, двойной кабель) и расположены внутри узлов сети. Например, в Alfa Romeo 147 нагрузочные резисторы 120 Ом расположены в компьютерном узле транспортного средства и в узле ABS.
Сбор цифрового сигнала - TNET
В случае ошибки связи CAN с одним из модулей, подключенных к сети, измерения следует проводить с помощью специального измерительного устройства, например, с использованием UniProbe Texa с функцией T-Net. Процедура диагностики сети CAN будет описана ниже с использованием модуля T-Net на примере сети C-CAN.
После выбора опции диагностики шины модуль T-Net попросит вас установить тип (тип) тестируемой сети. Это делается для адаптации программного обеспечения к тестируемой сети и ее функциям во избежание неправильной оценки отображаемых результатов диагностики. Сеть может быть распознана после скорости передачи данных от 500 кбит / с и после дифференциальных данных (параллельно подключены два согласующих резистора, каждый приблизительно 120 Ом).
Диаграмма, относящаяся к правильному функционированию сети C-CAN, показана на рис. 8. Следующая диаграмма (фото 9) представляет собой ситуацию, в которой две линии C-CAN (H и L) закорочены. В нижней его части находится сообщение Mem (Memorized), указывающее на ошибки, возникающие спорадически или уже отсутствующие. В этом случае Mem находится в полях, которые сообщают о коротких замыканиях в сети и отсутствии сигнала (короткое замыкание между линиями сбрасывает передачу сигнала).
Случайные случайные ошибки наиболее трудно диагностировать, потому что условия, которые вызывают отказ (температура, механические напряжения, трение и т. Д.), Не всегда появляются снова. В таких ситуациях возможности, предлагаемые системой T-Net, оказываются незаменимыми. Он должен быть подключен к сети в точках, где мы подозреваем неисправность и форсируем изменения условий труда, например, путем нагревания или механического воздействия на эти точки и участки сети, чтобы попытаться создать эту неисправность. Мгновенные затухания сигнала могут остаться незамеченными для глаз оператора, но T-Net не пропустит их. Благодаря этому вы можете получить ответ, который идентифицирует тип повреждения и дополнительно определяет, является ли ошибка спорадической или постоянной. Это облегчает обнаружение конкретной уязвимости.
T-Net сообщает об успешном форсировании ошибки, поскольку сигнал исчезает на обеих линиях. Затем необходимо проследить участок балки (витая пара) на предмет механических повреждений. Устранение их должно восстановить правильную передачу данных.
Последний шаг процедуры диагностики - это попытка очистить память ошибок в контроллерах, в которых ранее были прочитаны сообщения о сбое в сети CAN.
В статье использованы материалы диагностического программного обеспечения IDC4 Car Tex
Похожие
Диагностика кондиционераРис. Hella Многие гаражи выполняют автомобильные кондиционеры только в основном объеме и, как правило, в случае других ремонтов. Однако все чаще это не соответствует ожиданиям клиентов. Эта система требует периодического профессионального обслуживания, но в противном случае в ней появляются,